SSST Blog 5/13/20
Progress for the week:
Since this is essentially the last blog for the 2019/2020 academic year, and the last major thing that was accomplished this week was submitting the report, there is not that much individual subteam work that was completed. Rather, everyone came together to work on the final report throughout the entirety of the last week. The remainder of this blog will be dedicated to showcasing the final results through images of each of the subteams and also of the Small-Scale as a whole.
Controls Team
The final design of the controls team was two separate iOS apps, one allowing to connect and to send data to BLEs to activate the master Arduino code and another solely for a pleasant and informative UI experience. Although ultimately a keyboard was not able to be implemented successfully into the BLE testing app, a slider was added so that depending on its position, different 8-bit unsigned integer values (within a range specified in Xcode) can be sent to the BLE. Based on the value that is sent, that would correspond to a different barcode on the guideway and would activate the master Arduino code. The functionality of this Slider BLE testing app with all of the electronic components can be seen in the video below:
As far as the main Small-Scale iOS app, the final design ended up being 4 main tabs, 3 of which each have subtabs that the user can navigate to. The final tab is reserved for an interactive map that allows the user to see the location of the SPARTAN Superway Center relative to them. This can all be seen in the video below:
The next section will discuss the final design of the guideway team.
Guideway Team
Given the circumstances, the guideway team successfully developed a full Solidworks model that incorporates all of the components that would have been used to physically assemble the guideway. The guideway, pod, and bogie assembly were fully rendered using Fusion 360. A few of these renders can be seen below

Figure 1. Render of fully assembled guideway, pod, and bogie.

Figure 2. Render of fully assembled guideway, pod, and bogie.

Figure 3. Render of fully assembled guideway, pod, and bogie.

Figure 4. Render of fully assembled guideway, pod, and bogie.

Figure 5. Render of fully assembled guideway, pod, and bogie.

Figure 2. Render of fully assembled guideway, pod, and bogie.

Figure 3. Render of fully assembled guideway, pod, and bogie.

Figure 4. Render of fully assembled guideway, pod, and bogie.

Figure 5. Render of fully assembled guideway, pod, and bogie.

Figure 6. Render of fully assembled guideway, pod, and bogie.
The next section will discuss the final design of the bogie team.
The bogie team designed a bogie and pod that effectively solved the years objectives. These objectives were to create a pod and bogie that allows for easy access to electrical components, is esasy to assemble and dissasemble, and finaly one that has a reliable switching mechanism. Detailed images of the final design can be seen below.
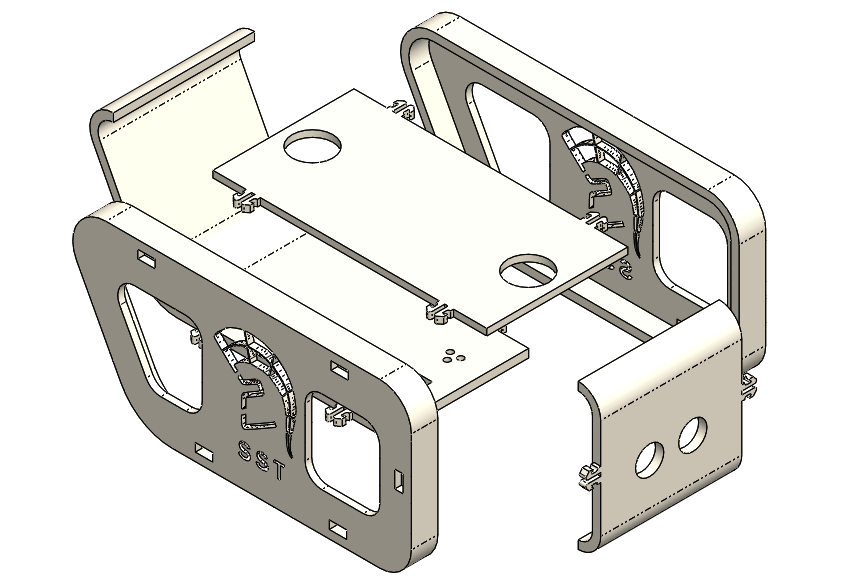
Figure 10. Exploded final pod design.
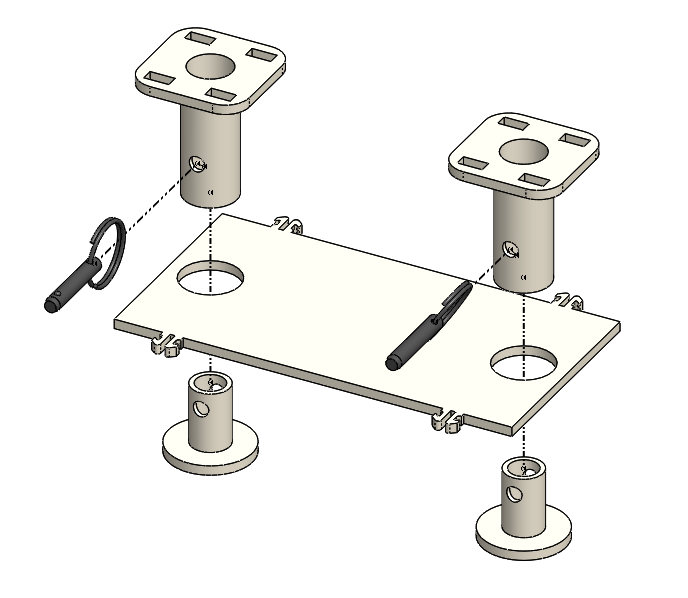
Figure 11. Exploded swivel connection design
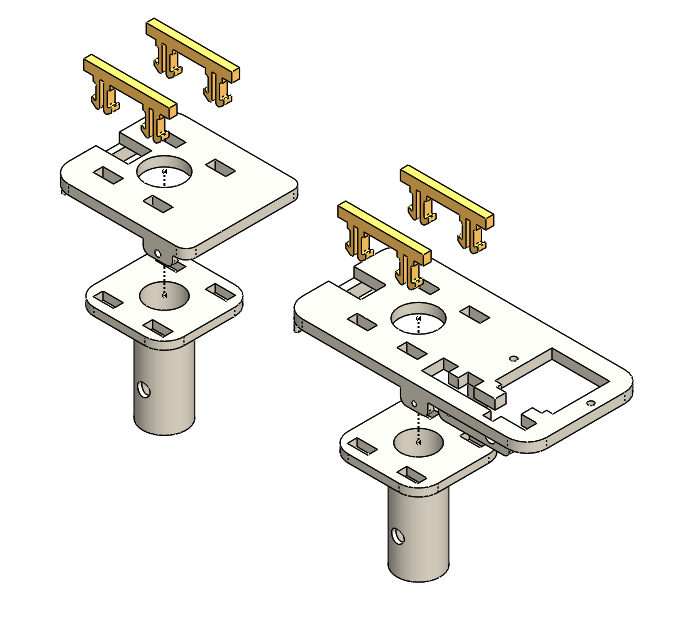
Figure 12. Exploded bogie design.
Some nice renders were also created using Fusion 360 to get a better idea as to how the pod would have looked once fully assembled. In Figure 13 shown below, a side view of the pod can be seen with a transparent material to depict how all of the electronic components would fit inside the pod.

Figure 13. Clear render of teh pod.
The next sections will discuss the progress made as a whole and the future plans for the coming weeks.
The team is overall content with how the project turned out as a whole. As much as every team member would have loved to have finished assembling and testing the entire project, under the current world circumstances, the situation was handled and executed to the best of everyone's abilities. The team is happy with the overall experience that working on the SPARTAN Superway provided, along with all of the people that the team interacted with. From Dr. Furman to Ron, to hearing Eric through the computer as teams presented, every part of the academic year was enjoyable. Many challenges were presented and overcome. It is safe to say that everyone grew from this experience and the Small-Scale Team became close friends.
The team still hopes that once the current shelter in place order is lifted and things return to the new norm, (hopefully sometime during the summer) there were will be a chance to finish assembling and testing the guideway. As far as the app is concerned, updates will continue to be made throuhgout the next few weesk to leave the next team as prepared as possible to take the app to an even more advanced level. Documentation of a step by step guide for the app development process is being put together and will be available in the coming weeks. Thank you for a great year!
Written by:
Julio de Pereda Banda
May 13th, 2020
Comments
Post a Comment