SSST Blog 3/4/20
Progress for the week:
Controls Team:
The controls team this week made significant progress with the pixy cam. The cam is now integrated into the main arduino code with the BLE, ultrasonic, and motor. The program waits for an input from the BLE then looks for the corresponding bar code, as shown in Figure 1., using the pixy while running the motor. It stops when the bar code is found.

Figure 1: Bar codes that the Pixy cam will recognize as different stations.
The blog man who wrote the guide to connect the iOS app to the BLE also responded back to Julio, giving useful tips to try to fix the connection issues. These tips will be used in the upcoming week to help run the app smoothly.
Guideway Team:
The outer loop of the track was assembled onto the base. Most if not all of the nuts, washers and rods were used, as well as the straight and curved pieces. More of these pieces and parts will need to be bought or manufactured in the Makerspace.
The same limitation with the laser cutter applies in that it can only cut material as big as 18''x 32''. This means that the team will need to take that into consideration before taking material to be cut. The big inner loops as shown in Figure 2 will need to be redesigned so that it can be properly laser cut with the machine we use.

Figure 2: Current track in Solidworks that needs to be updated.
The bogie has been coming along together nicely. The gears have come in and they fit well with the motor. The bogie and pod have been implemented into the Solidworks file to test for any errors or constraints the track might have. Currently, there is a gap in the track that needs to be fixed. It has also been determined that the speed of the bogie and pod around the track will be significantly slower than what was previously intended, so as to avoid any swinging that could occur with it. The bogie and pod have already began being assembled, as shown in Figure 3 and 4.
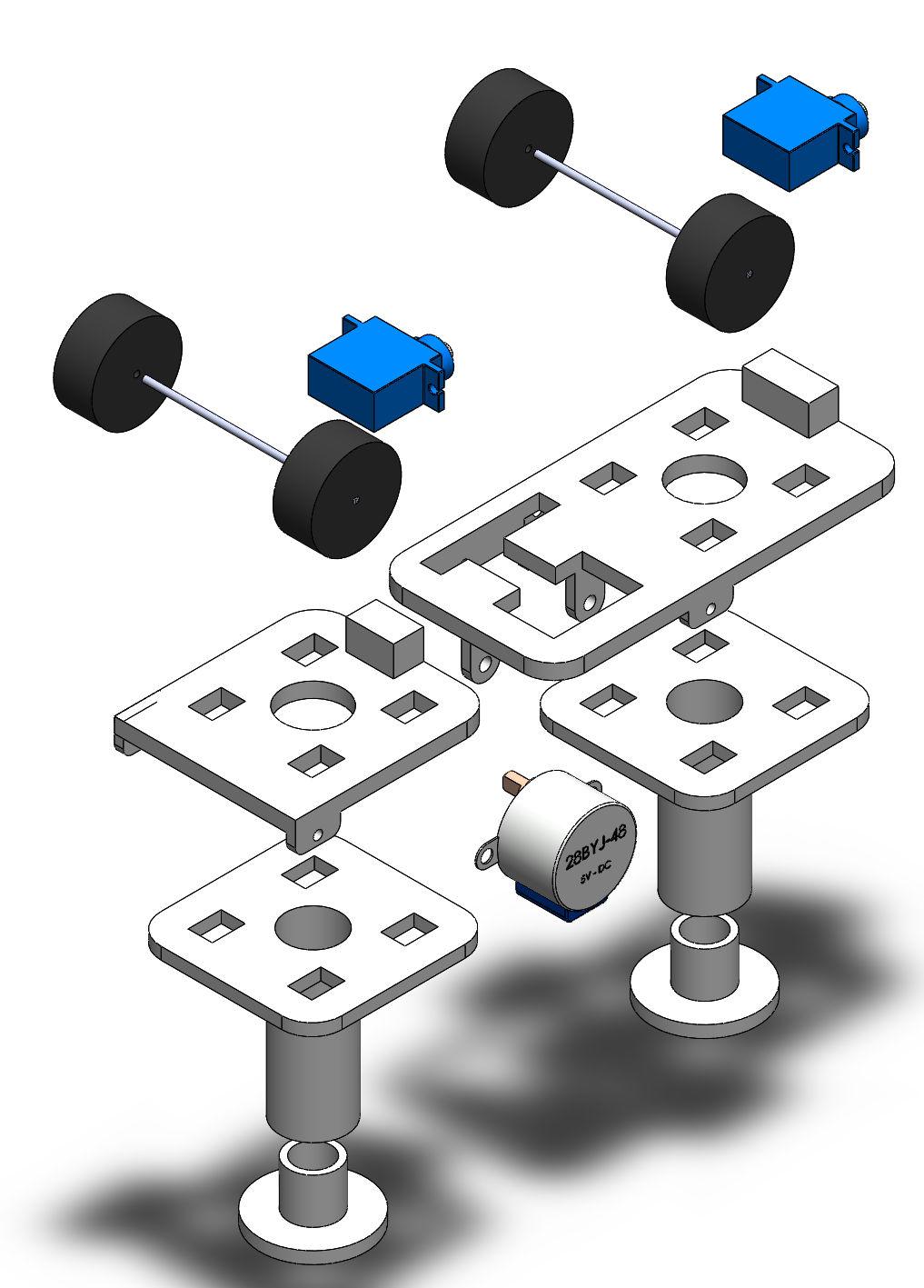
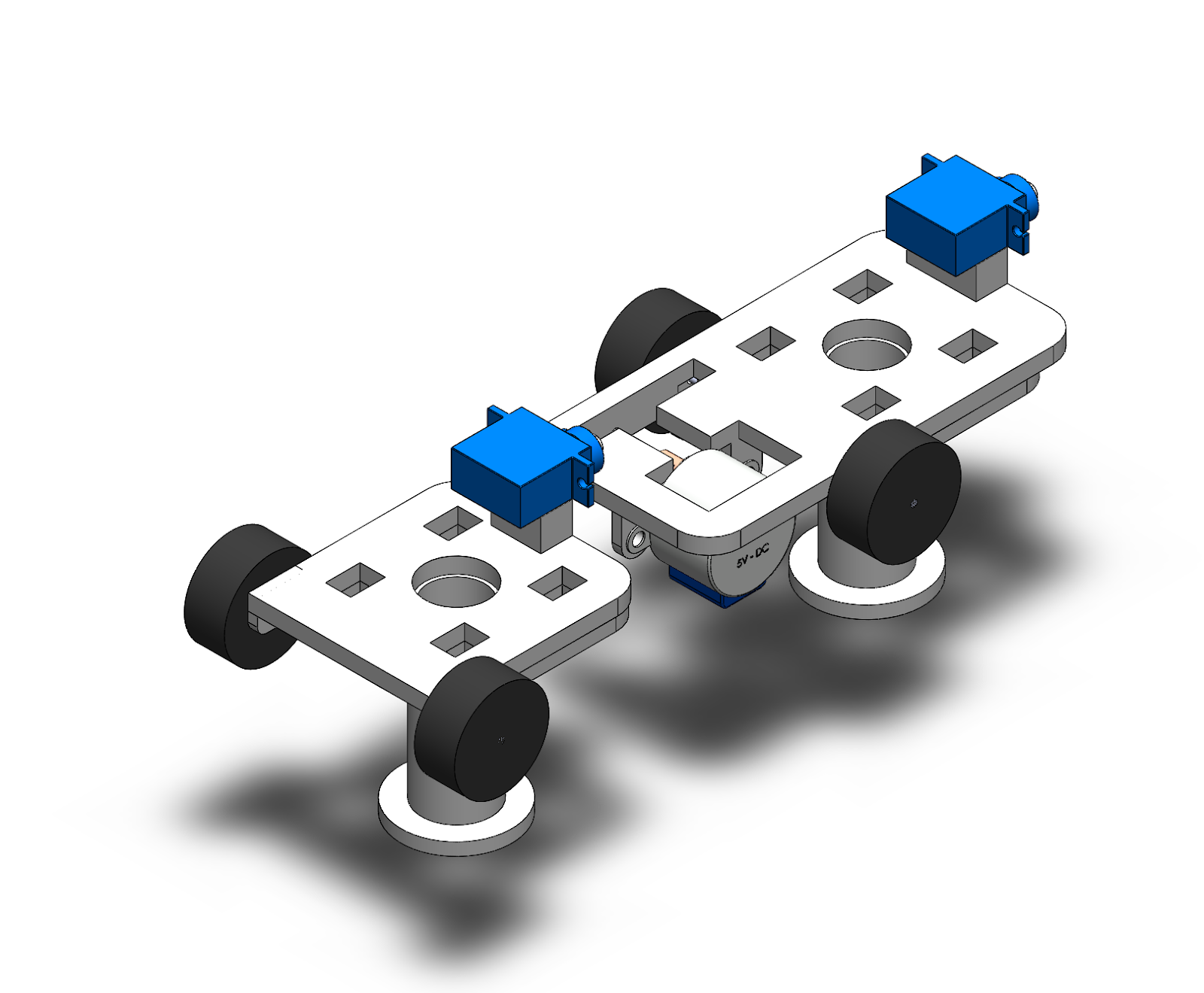
Figure 3: Bogie snap fit design.

Figure 4: First iteration of pod with snap-fit design.
The team has been working together to assemble most of the track and bogie. The controls are still being tested, but hopefully with the completion of the track and pod, actual testing on the guide way can begin.
In the next week, the guideway team plans to finish printing out the inner track pieces and complete assembly of the overall track. With the whole COVD-19 situation going on in California and around the world, there might be some delay based on whether the Makerspace will be open or not this week to the public. If not, the team will have to work with what they have until the Makerspace is available again. The controls team will continue to improve on the Arduino code and iOS connection to the BLE. With the pod and bogie components, assembly should start to occur no later than the end of March. The Pixy cam will also continue to operate and be tested with the motor and ultrasonic sensor to ensure that all works well. The goal is to have a complete assembly of the track and bogie so that it can be tested with the controls by the end of this month.
Written by:
Justin Ghieuw
March 4th, 2020
Comments
Post a Comment