SSST Blog 2/27/20
Progress for the week:
Controls Team
This week for the controls team, Asmaa made progress with the Pixy2 cam. She continued to work on learning how to use the Pixy cam software, she was also able to get the pixy cam to read different bar codes which will eventually represent stations on the guideway. Some of the bar codes that will be used for the Pixy cam to head to different stations can be seen below in figure 1:

Figure 1: Bar codes that the Pixy cam will recognize as different stations.
Asmaa also worked on an Arduino code which implemented the Pixy cam into the prior codes that had been written. The Fritzing layout can be seen below in figure 3:
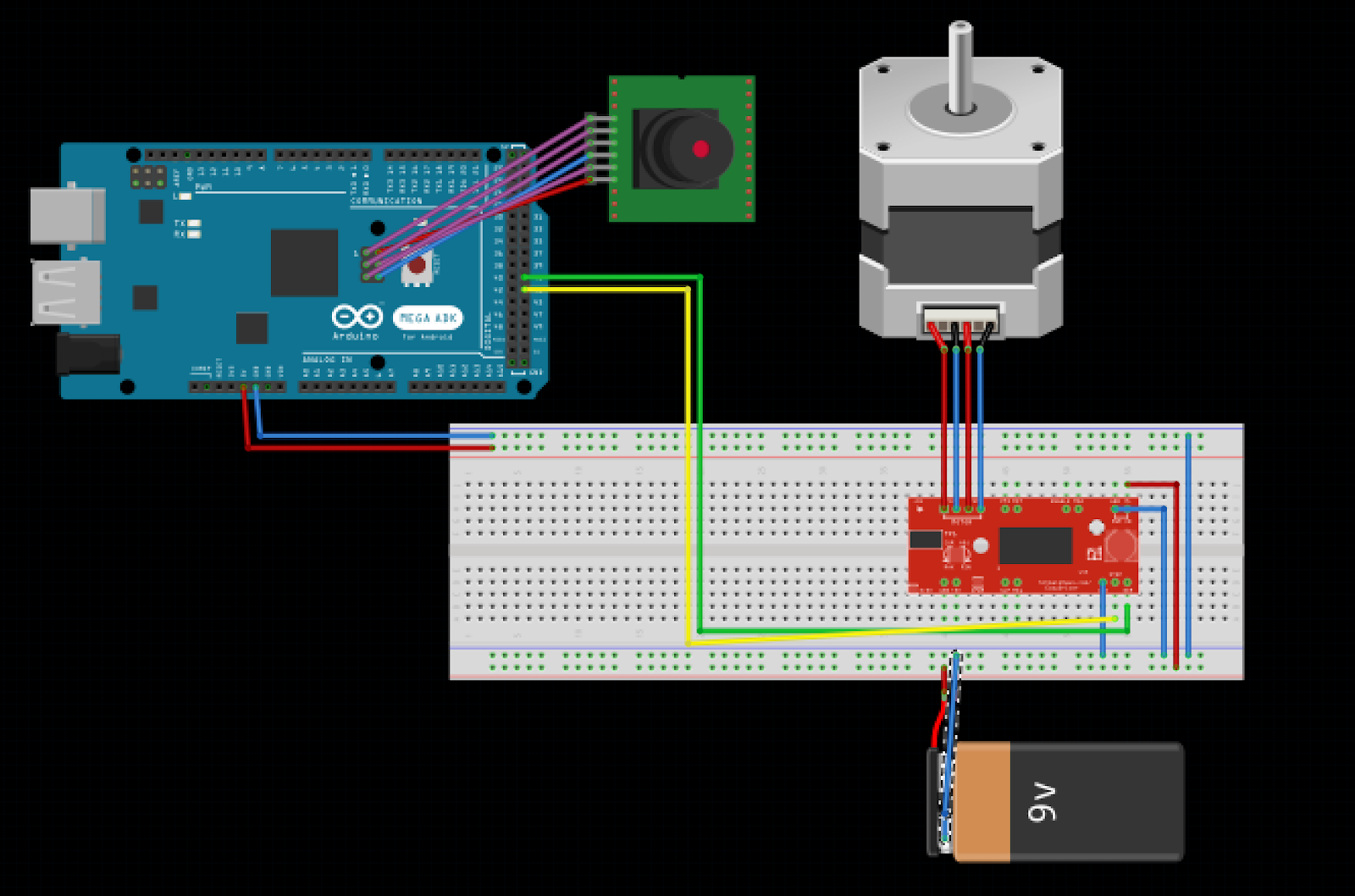
Figure 2: Fritzing layout of implementation of Arduino and Pixy cam
In terms of the app, progress was made with the connection between the iOS app and the BLE. A new guide was followed as to how to establish this connection, however, the app gets stuck in the scanning phase. Essentially, there are a number of events that need to take place throughout the code in order to establish a connection. The BLE's UUID is input into the Xcode program, the iPhone which the app is running on begins to search for that specific UUID. If indeed it does find the BLE in its search, the user will be notified that the connection to the BLE was made. Then a comparison between other possible connectable devices is done to ensure that the iPhone has connected to the correct device.
Unfortunately at this current moment, the app gets stuck on the scanning phase, and all that is displayed in the output log screen in Xcode is the following:
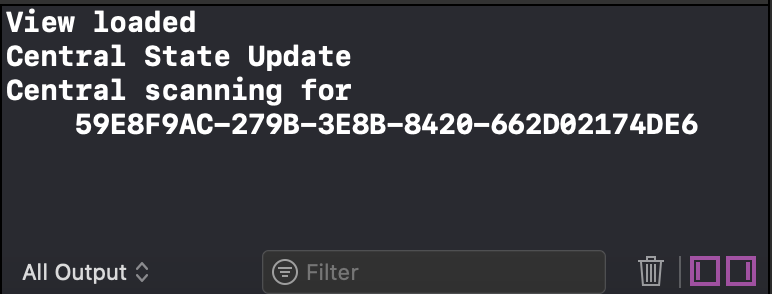
Figure 3: Output log screen of iOS app at the current moment.
Guideway Team:
The guideway team continued to make progress with the track by continuing to laser cut the pieces. It was planned that they are going to cut the majority of the pieces and begin assembling part of the track this weekend.
A limitation with the laser cutter is that it can only cut material as big as 18''x 32''. This means that the team will need to take that into consideration before taking material to be cut. This can be seen in figure 5:
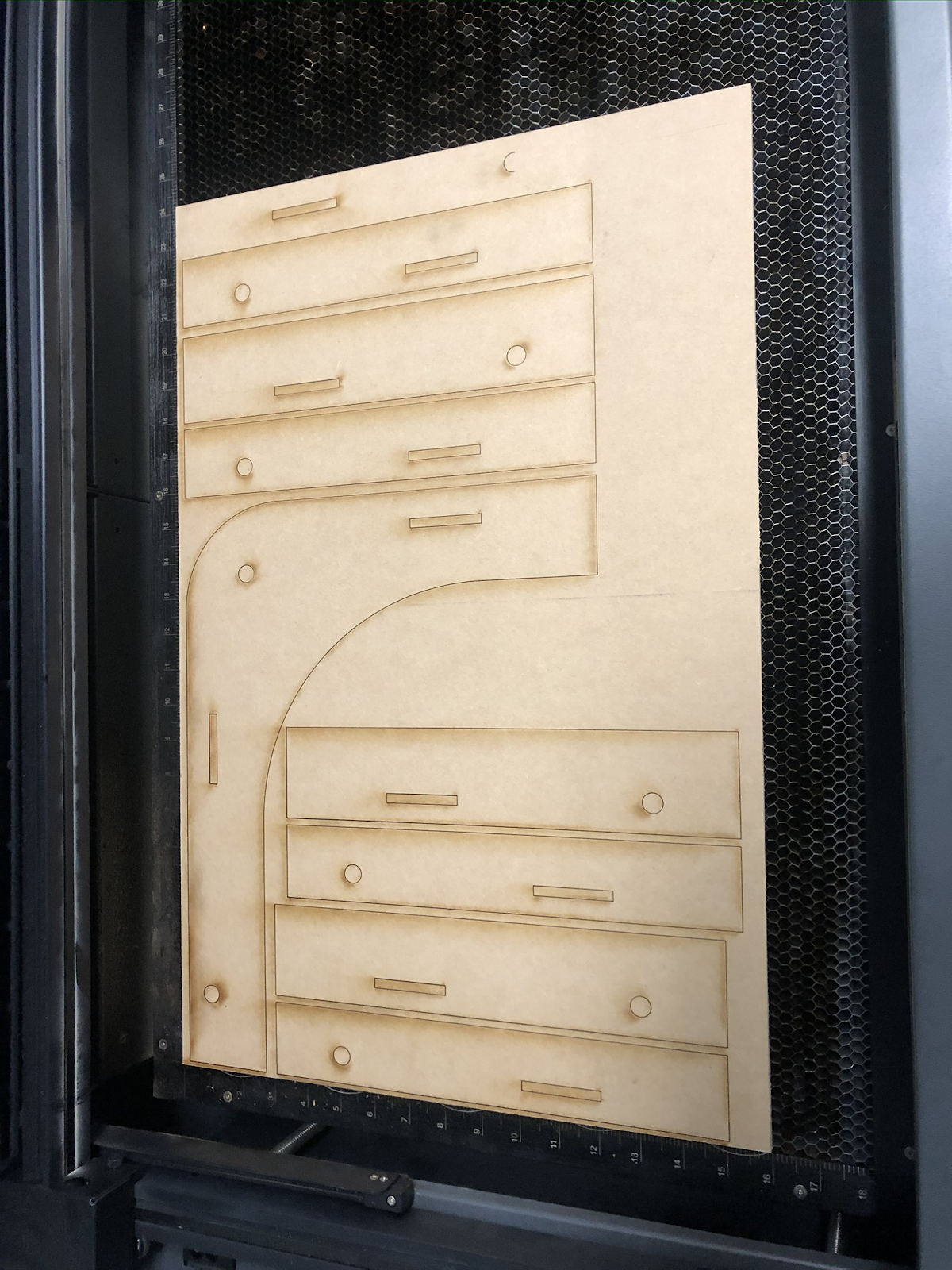
Figure 4: Laser cutter limitations in dimensions.
The team also updated the 3D model in Solidworks. The updated track can be seen below with the same design intentions of having three main components: track, stands, and the base.

Figure 5: Updated track in Solidworks.
The cake layer design of the track will be held together by rods, nuts and washers as can be seen below in figure 6:
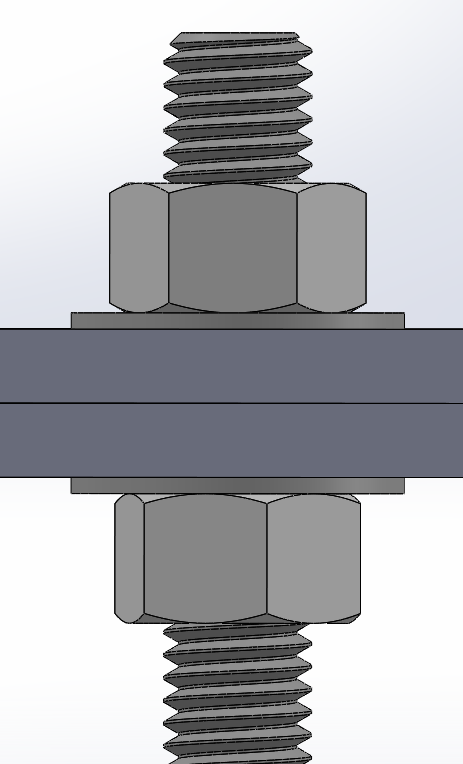
Figure 6: Connection of track cake layer design with rods, nuts and washers.
The rods which also act as the main supports allow for the guideway to be lowered and raised with ease by adjusting the nuts and washers to the desired height.
The bogie team picked out the necessary gears, purchased them on Amazon and are waiting for them to be delivered. Once, delivered the team will test whether or not they work with the stepper motor. More pod parts were also 3D printed to complete the first full prototype of the bogie.
The images below are the snap-fit mechanism which will allow us to attach the bogie and the pod in an easier manner than prior years models.
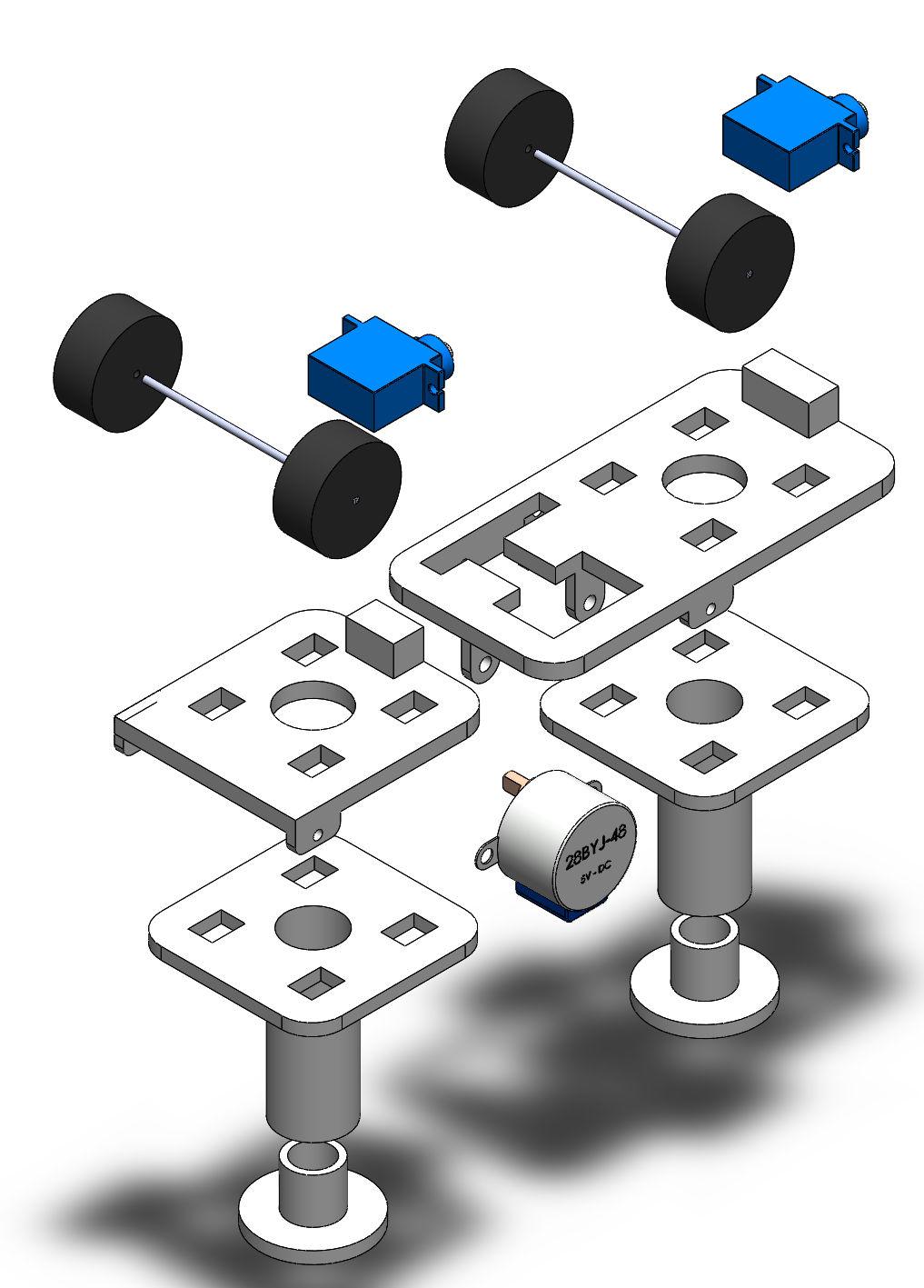
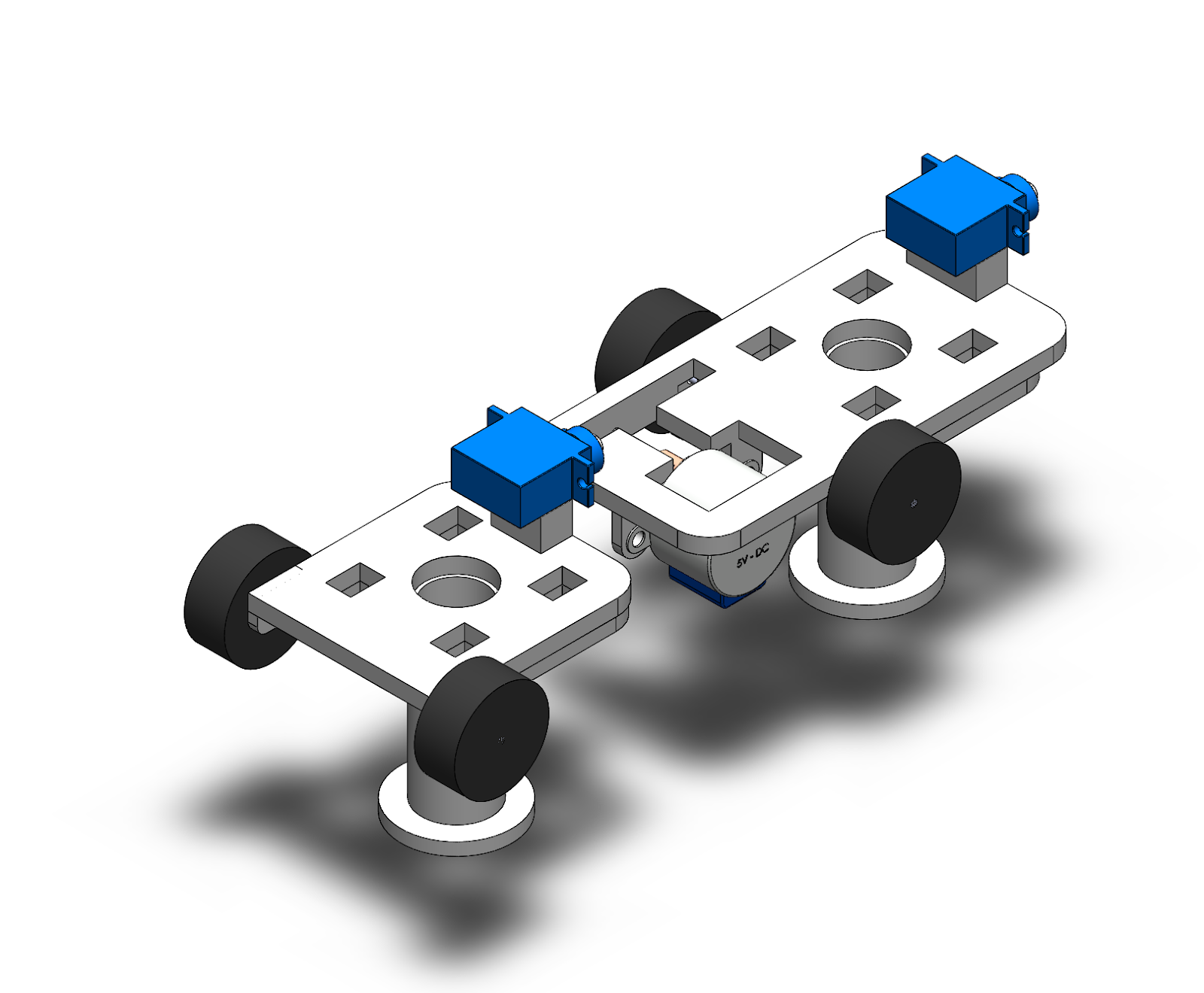
Figure 6: Bogie snap fit design.
The first fully printed and assembled pod can be seen below in figure 8:

Figure 7: First iteration of pod with snap-fit design.
The next version will alter the dimensions of the snap fit design so that it is easier to assemble and disassemble the pods.
The team gave the first presentation of the spring semester to update the rest of the class as to what we have accomplished since our final presentation from last semester. Due to the presentation, there was not as much work completed this week. However, we are planning on meeting several times next week to make up for the lost time due to the presentation.
In the next week, the guideway team plans on continuing to laser cut the wood pieces and hopefully with the help of the entire team, the guideway can be assembled in the next week or so. The bogie team will continue to fix the 3D models and once the gears arrive, begin implementing everything together. Another iteration of the pod will be 3D printed with modifications that were made due to some minor design flaws in the first iteration of the pod. The controls team will continue testing the Pixy cam and will also begin to develop a code to incorporate the motor, ultrasonic sensor and Pixy cam into one code. The iOS app will be able to connect to the BLE within the next week or so.
Written by:
Julio de Pereda Banda
February 27, 2020
Comments
Post a Comment