Team Blog #3
What we have completed:
This week the Progress was made on the guideway and with controls. The controls team focused on writing some preliminary Arduino scripts and developing the interface of the app that will be used. Using some of the sensors and motors that we already have. The controls team was able to roughly simulate what the the motors on the pods will be doing. Using the apple programming language swift, the team was able to begin developing a basic layout of what the interface will look like. The only issue that the controls team is currently facing is how to use swift on non mac laptops.
The Guideway Team focused on determining the best design for supporting the guideway rails with the base piece. There are two options that have been considered so far. The first option consists of a rectangular stand (2X4 wood) with a slot as seen in Figure 1 part 2. There will be an aligner tool as shown in Figure 2 that is used to clamp down the track to the rectangular stand. Option 2 would consist of using a PVC pipe with a threaded stud inside to screw down into the base board as shown in Figure 1 part 4.
There are some issues with each option considered. The first issue is how to eliminate any drastic wobbling that can take place in either design. By having good connections between the base and stand as well as the stand and rails, we reduced the amount of shaking while the bogie traverses the track. The second issue would be how to deal with fractures and cracks close to critical connection points.
Next Steps:
For the Controls Team, the next steps will be to buy the research different bluetooth modules, and buy the one that best suits our needs. Another that must be done next week, is the purchase of all the other sensors that the team will need. This will allow for further development of both the final arduino script and the app.
The next goal for the Guideway Team would be to prototype a few components from both designs and see which performs better.

Figure 1. Parts 1 and 2 show the 2x4 wood support. Parts 3 and 4 show the PVC support.
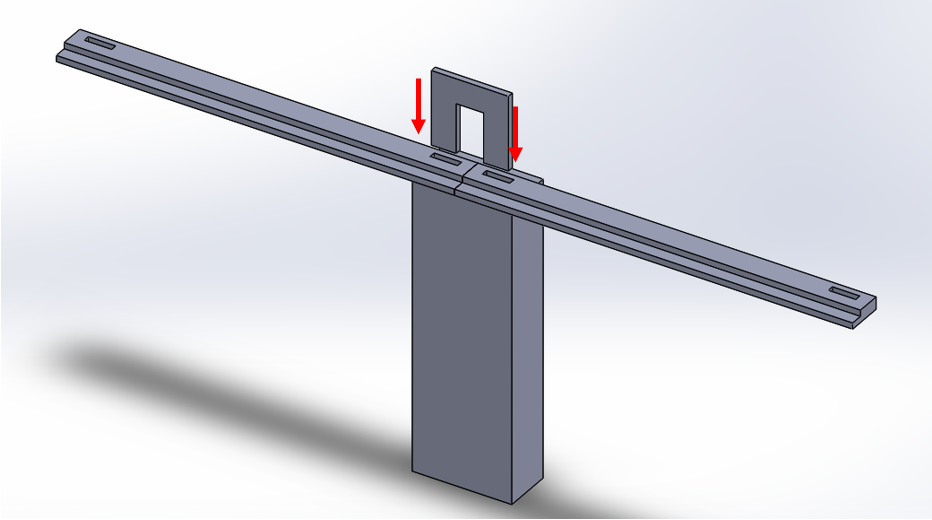
Figure 2. The aligner tool will slide into the slot on the track and wood support.
Comments
Post a Comment